Years 2017
Author Marco Massarenti
Advisor Emiliano Mucchi
Bachelor/Master Bachelor
Company MechVib RG
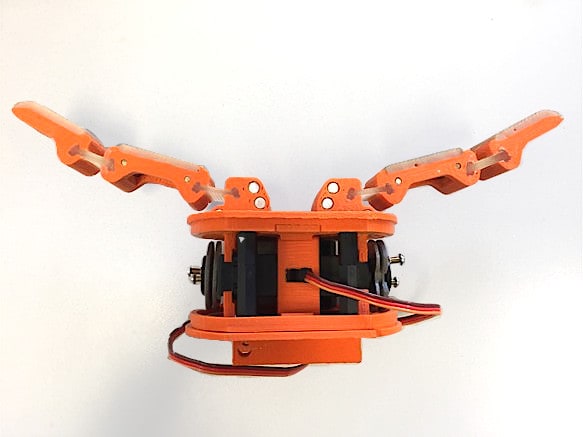
The aim of the thesis is to develop a robotic hand following the instructions provided by Yale University, so that it is easily controllable with a reduced number of actuators and that it is able to perform gripping operations even in an unstructured environment.